|
Mike Alpha
|
|
|
Group: Forum Members
Posts: 3,
Visits: 0
|
Hi all, It is much simpler than it seems: all requiredhardware is already available on the market. All we need is a ‘piece’ ofsoftware (OK, it can be more than just a piece). For illustration here is a typical device scheme: 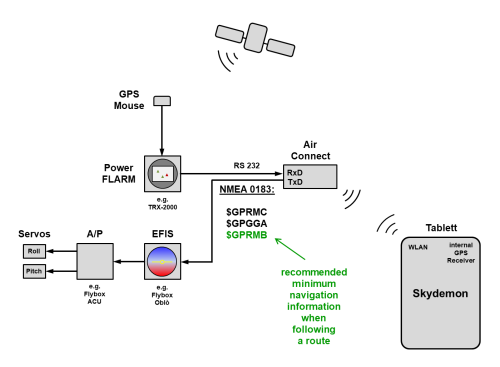
The PowerFLARM sends the GPS coordinates and trafficinformation via RS 232 to the RxD port of the AIR CONNECT. From there the data goesvia WLAN to the Tablet -> SkyDemon. So far so good. The EFIS receives the data sentences $GPRMC and $GPGGAin accordance with the NEMA1083 format. These data usually come from the GPSmouse. This makes it possible to fly in connection with the AUTOPILOT CONTROLUNIT in heading/tracking holding mode (but not in the navigation mode). To fly to a certain waypoint or to track a flight routein the navigation mode, we need the $GPRMB data set in addition! Therefore the solution would look like this: SkyDemonprepares the NEMA datasets - $GPRMC - $GPGGA - $GPRMB The GPS coordinates itself can either come from anexternal source (FLARM) or from the internal GPS receiver of the tablet, liketoday. Only the sentence $GPRMB is added. This stands for"recommended minimum navigation information when following a route".The exact structure is defined in NEMA1083. The details are publicly available. SkyDemon would only have to SEND these three data setsvia WLAN to the bidirectional AIR CONNECT. From there they would be forwarded via the TxD portof the RS232 interface to the EFIS. That would be all! On the hardware side, everything is available. Only the implementation of the algorithm isrequired to prepare the $GPRMB data set. @Tim: It would be great if you could take a look atthis suggestion. It would be extremely helpful in practice if we could use theNAV function of the autopilot and follow the currrent SkyDemon routeautomatically. Today you have to trim the autopilot by hand and change thecourse manually fter the next leg. Not really practical. From my point of view this would be a further great featurefor SkyDemon! Mike
|
|
|
|
|
Joachim Gothe
|
|
|
Group: Forum Members
Posts: 19,
Visits: 58
|
Hi, I have Skydemon on an iPad, Powerflarm, Air Connect Modul, Trio Autopilot and a VAN's RV6 Experimental. I am electronic engineer. Do you need a Beta Tester ?? . ;-) I will be on AERO in Friedrichshafen on the first day of the fair.
Achim
|
|
|
|
|
Tim Dawson
|
|
|
Group: Forum Members
Posts: 8.3K,
Visits: 10K
|
So have you got your autopilot connected such that comms with your AirConnect are routed to it? Just so we are clear?
|
|
|
|
|
Mike Alpha
|
|
|
Group: Forum Members
Posts: 3,
Visits: 0
|
as far as it concerns me I use exactly the illustrated combination.
The only thing to change on the hardware side is the connection from the EFIS GPS Input (RX) to the Air Connect (TX, PIN 3). Today the EFIS (in my case Flybox Oblò) gets the GPS coordinates directly from the FLARM device.
If you are interested, I would also be happy to support you for testing.
|
|
|
|
|
Michael Rubio
|
|
|
Group: Forum Members
Posts: 25,
Visits: 85
|
Anybody knows if this (-or similar hardware out there) somehow in some kind of way can be used to link Autopilot with the need for an NMEA signal with Skydemon IPad?
|
|
|
|
|
pilot-byom
|
|
|
Group: Forum Members
Posts: 323,
Visits: 388
|
NMEA2000 is a very bad thing to do as almost no aviation devices will understand that. NMEA0183 or AVLINK will do the job and it does. Yes, I was with a friend doing the Trio for certified EASA-reg and yes, I saw the Trio autopilot driven by BT from a moving map navigational app - even though it is not Skydemon the setup looked easy enough to do that in a very short time on any moving maps. I won't do marketing for the competition, but this is a wake up call.
|
|
|
|
|
Michael Rubio
|
|
|
Group: Forum Members
Posts: 25,
Visits: 85
|
+xSo have you got your autopilot connected such that comms with your AirConnect are routed to it? Just so we are clear? Hi Tim,
Is there now or will there soon to come be the possibility to have Skydemon controlling/output a signal for an autopilot? (I'm about to order a new ultralight airplane and would like to avoid a GARMIN or DYNON setup if I can do with a Skydemon and iLevil setup)
Tnx. Rubio
|
|
|
|
|
russellp
|
|
|
Group: Forum Members
Posts: 15,
Visits: 17
|
Are we just talking about dropping a pre programmed route from the tablet to the auto pilot ? Or more?
|
|
|
|
|
pilot-byom
|
|
|
Group: Forum Members
Posts: 323,
Visits: 388
|
+x+xSo have you got your autopilot connected such that comms with your AirConnect are routed to it? Just so we are clear? Hi Tim,
Is there now or will there soon to come be the possibility to have Skydemon controlling/output a signal for an autopilot? (I'm about to order a new ultralight airplane and would like to avoid a GARMIN or DYNON setup if I can do with a Skydemon and iLevil setup)
Tnx. Rubio Looks Skydemon is not really interested in the matter, two other solutions already do that, so I suspect Skydemon will reconsider ... sometimes.
|
|
|
|
|
DMOIN
|
|
|
Group: Forum Members
Posts: 10,
Visits: 27
|
pushing this up....
So I can tell you that Sky Map is doing exactly what is requested. They have teamed up with this Company: ICFLY
The Sky Map Software is ugly compared to Skydemon but has undergone some nice developments to be open for third Party HW but especially ICfly. ICFLY delivers ADS-B Traffic monitors, Rotax Engine Dtaa boxes, Instruments, Sensors and some other nice HW useful in Experimental Aircrafts.
ICFly is also capable to show the Engine data on a second device/or same ipad (iPad prefered) and also 3D Vision. In the newer Z602 microlights, coming from Roland Aircraft, you can have full synthetic vision using two ipads that can be slided into some frames and can be dismounted in seconds if needed. Behind the Tablets there are "emergency" instruments, in case the iPads would fail:
So the only thing Skydemon needs to provide would be a NMEA protocol via WiFi to be send to this WiFi dongle. But I suspect that Skydemon is willing to develop such solution as long it does not fullfil their own personal needs......
|
|
|
|